



Dans ce cas, nous avons développé un pince magnétique pour une application de manutention automatisée sur le site de production d'un client. En tant que fabricant d'aimants électro-permanents, nous avons travaillé en étroite collaboration avec le client pour concevoir une pince qui pourrait être montée à l'extrémité d'un bras robotisé et fonctionner avec un système de vision.

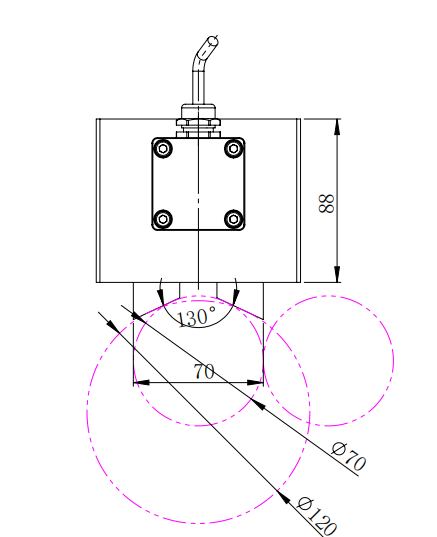
Le client avait besoin de manipuler des pièces à arbre rond de tailles très diverses. Les pièces ont des diamètres de 70 mm à 120 mm, des longueurs de 100 mm à 1800 mm et un poids maximum de 40 kg. Le processus de manipulation nécessitait une prise stable, un positionnement précis et des mouvements fluides pendant le fonctionnement automatisé.

Sur la base de ces exigences, nous avons conçu une pince magnétique utilisant deux aimants électro-permanents HEPMT-1611G fonctionnant ensemble. Cette configuration fournit une force de maintien suffisante tout en permettant au robot de manipuler des arbres courts ou longs. La pince magnétique se monte directement sur la bride du robot et se connecte au système de commande pour une simple commande magnétique marche/arrêt.
Lors des essais sur site, le préhenseur magnétique a démontré des performances fiables en combinaison avec le système de vision. Le robot a été capable d'identifier, de saisir, de soulever et de transférer des arbres de différentes tailles sans ajustements mécaniques. La méthode de préhension sans contact a permis de protéger la surface des pièces à usiner et de réduire le besoin de fixations mécaniques complexes.
L'essai a également montré que la pince magnétique pouvait s'adapter aux changements de longueur et de position des pièces. Grâce au guidage par vision, le robot a maintenu des points de préhension cohérents et un mouvement stable tout au long du processus de manipulation. La conception électro-permanente a assuré un maintien sûr pendant le fonctionnement tout en ne nécessitant de l'énergie que pendant la magnétisation et la démagnétisation.
Ce projet confirme qu'un pince magnétique est bien adapté à la manipulation automatisée de pièces cylindriques en acier. Il offre une solution simple, stable et flexible pour les applications robotiques dans les systèmes d'automatisation modernes.

