



Nesse caso, desenvolvemos um pinça magnética para uma aplicação de manuseio automatizado de materiais em um local de produção do cliente. Como fabricante de ímãs eletropermanentes, trabalhamos em estreita colaboração com o cliente para projetar uma garra que pudesse ser montada na extremidade de um braço robótico e operar em conjunto com um sistema de visão.

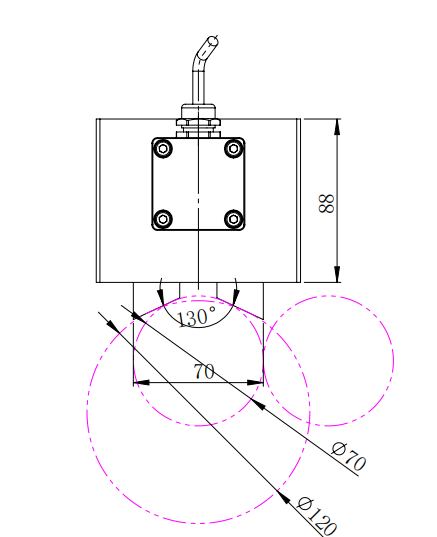
O cliente precisava manusear peças de eixo redondo com uma ampla variedade de tamanhos. As peças têm diâmetros de 70 mm a 120 mm, comprimentos de 100 mm a 1800 mm e um peso máximo de 40 kg. O processo de manuseio exigia uma garra estável, posicionamento preciso e movimento suave durante a operação automatizada.

Com base nesses requisitos, projetamos uma garra magnética usando dois ímãs eletropermanentes HEPMT-1611G trabalhando juntos. Essa configuração fornece força de retenção suficiente e permite que o robô manuseie eixos curtos e longos. A garra magnética é montada diretamente no flange do robô e se conecta ao sistema de controle para um controle magnético simples de ligar/desligar.
Durante os testes no local, a garra magnética demonstrou desempenho confiável em combinação com o sistema de visão. O robô foi capaz de identificar, agarrar, levantar e transferir eixos de diferentes tamanhos sem ajustes mecânicos. O método de preensão sem contato ajudou a proteger a superfície das peças de trabalho e reduziu a necessidade de fixações mecânicas complexas.
O teste também mostrou que a garra magnética pode se adaptar bem às mudanças no comprimento e na posição da peça. Usando a orientação visual, o robô manteve pontos de preensão consistentes e movimento estável durante todo o processo de manuseio. O design eletropermanente garantiu uma fixação segura durante a operação, exigindo energia somente durante a magnetização e a desmagnetização.
Este projeto confirma que um projeto adequado pinça magnética é adequado para o manuseio automatizado de peças cilíndricas de aço. Ele oferece uma solução simples, estável e flexível para aplicações robóticas em sistemas de automação modernos.

