



في هذه الحالة، قمنا بتطوير قابض مغناطيسي حل لتطبيق آلي لمناولة المواد في موقع إنتاج أحد العملاء. بصفتنا شركة مصنعة للمغناطيس الكهربائي الدائم، عملنا عن كثب مع العميل لتصميم قابض يمكن تركيبه في نهاية ذراع روبوتية وتشغيله مع نظام رؤية.

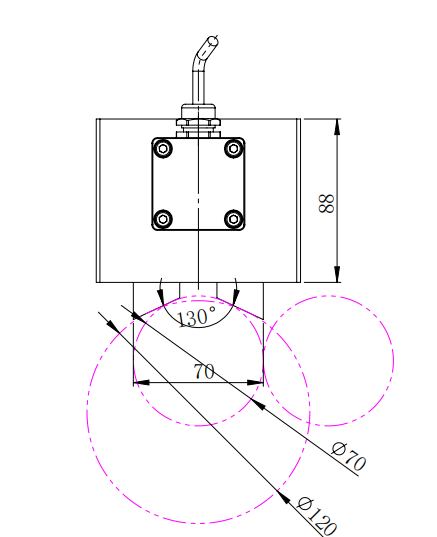
كان العميل بحاجة إلى مناولة قطع عمل الأعمدة الدائرية ذات مجموعة كبيرة من الأحجام. وتتراوح أقطار الأجزاء من 70 مم إلى 120 مم، وأطوالها من 100 مم إلى 1800 مم، ووزنها الأقصى 40 كجم. تطلبت عملية المناولة إمساكًا مستقرًا وموضعًا دقيقًا وحركة سلسة أثناء التشغيل الآلي.

واستنادًا إلى هذه المتطلبات، قمنا بتصميم قابض مغناطيسي باستخدام مغناطيسين HEPMT-1611G كهربائيين دائمين يعملان معًا. يوفر هذا التكوين قوة إمساك كافية مع السماح للروبوت بالتعامل مع كل من الأعمدة القصيرة والطويلة. يُركب القابض المغناطيسي مباشرةً على شفة الروبوت ويتصل بنظام التحكم للتحكم المغناطيسي البسيط في التشغيل/إيقاف التشغيل.
أثناء الاختبار في الموقع، أظهر القابض المغناطيسي أداءً موثوقًا به مع نظام الرؤية. كان الروبوت قادرًا على تحديد الأعمدة ذات الأحجام المختلفة وإمساكها ورفعها ونقلها دون الحاجة إلى تعديلات ميكانيكية. ساعدت طريقة الإمساك بدون تلامس في حماية سطح قطع العمل وقللت من الحاجة إلى تركيبات ميكانيكية معقدة.
أظهر الاختبار أيضًا أن القابض المغناطيسي يمكنه التكيف بشكل جيد مع التغيرات في طول الجزء وموضعه. وباستخدام التوجيه البصري، حافظ الروبوت على نقاط إمساك ثابتة وحركة ثابتة طوال عملية المناولة. وقد ضمن التصميم الكهربائي الدائم الإمساك الآمن أثناء التشغيل مع الحاجة إلى الطاقة فقط أثناء عملية المغنطة وإزالة المغنطة.
يؤكد هذا المشروع أن التصميم الصحيح قابض مغناطيسي مناسب تمامًا للمناولة الآلية للقطع الفولاذية الأسطوانية. وهي توفر حلاً بسيطًا ومستقرًا ومرنًا للتطبيقات الروبوتية في أنظمة الأتمتة الحديثة.

