


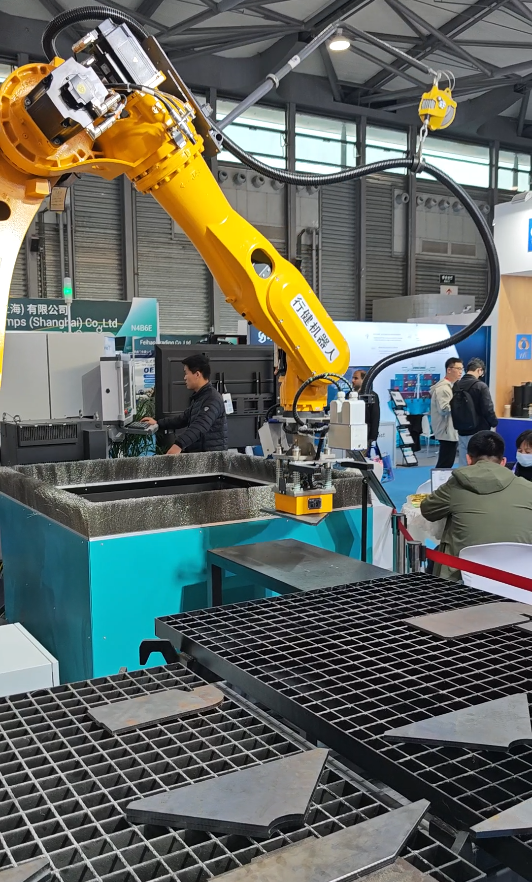
Em muitas oficinas, a coleta manual de peças de aço cortadas a laser pode ser lenta e cansativa. Uma solução prática que vimos envolve a instalação de uma garra magnética na extremidade de um braço de robô. Essa configuração ajuda a levantar e mover automaticamente as peças após o corte.
Integração com sistemas de orientação visual
Quando combinada com sistemas de visão robótica, a garra magnética permite a localização e a recuperação precisas de componentes. O sistema de visão identifica as posições e orientações das peças cortadas e, em seguida, comunica as coordenadas ao controlador robótico. Em seguida, a garra se posiciona com precisão sobre cada componente, engatando apenas quando o alinhamento adequado é obtido. Essa abordagem coordenada reduz os erros de posicionamento e minimiza os danos às peças durante o manuseio.
O que isso significa para o workshop
Essa abordagem ajuda a manter a área de trabalho organizada e permite que a máquina de corte funcione de forma mais contínua. Os trabalhadores passam menos tempo separando as peças manualmente e podem se concentrar em outras tarefas. A garra magnética é simples, sem peças móveis, portanto, requer pouca manutenção e funciona de forma consistente em todos os turnos.
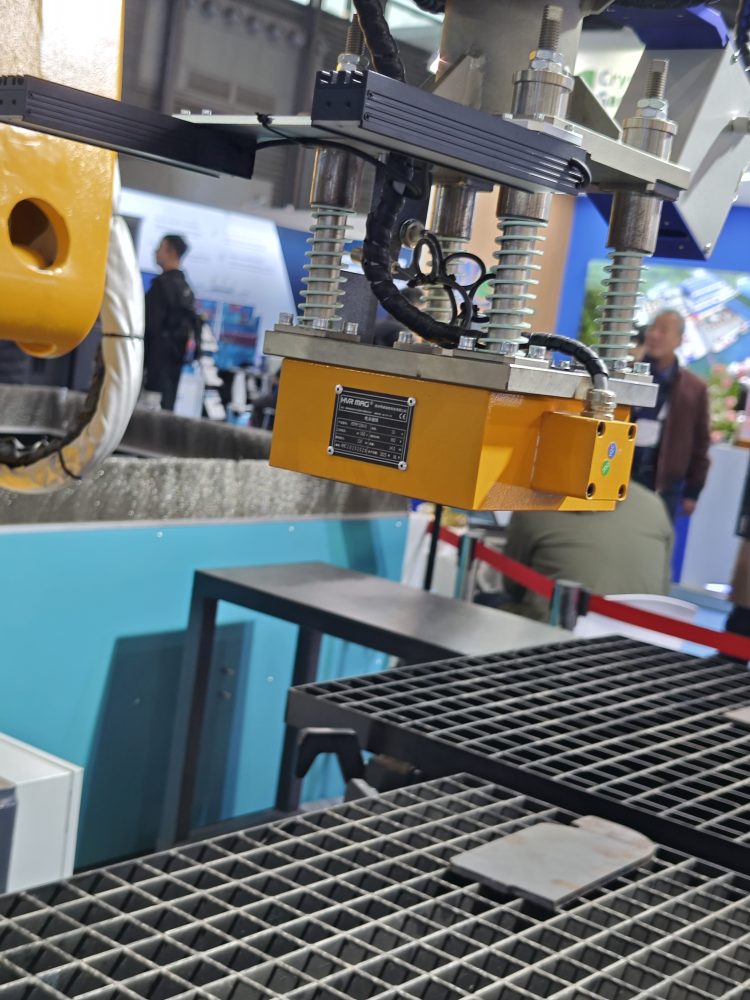
Configuração
Para que isso funcione bem, o ímã precisa ter a força certa para as peças que estão sendo levantadas. O sistema de câmera deve ser ajustado para reconhecer as peças claramente sob a iluminação da oficina. A boa comunicação entre a câmera, o robô e a garra torna todo o processo suave e eficiente.
Esse é um exemplo de como as garras magnéticas, quando combinadas com a automação básica, podem ajudar as oficinas a trabalhar de forma mais inteligente, reduzindo o esforço manual e mantendo as coisas funcionando sem problemas.

