



В этом случае мы разработали магнитный захват решение для автоматизированной обработки материалов на производственной площадке заказчика. Будучи производителем электропостоянных магнитов, мы тесно сотрудничали с заказчиком, чтобы разработать захват, который можно было бы установить на конце роботизированной руки и использовать вместе с системой технического зрения.

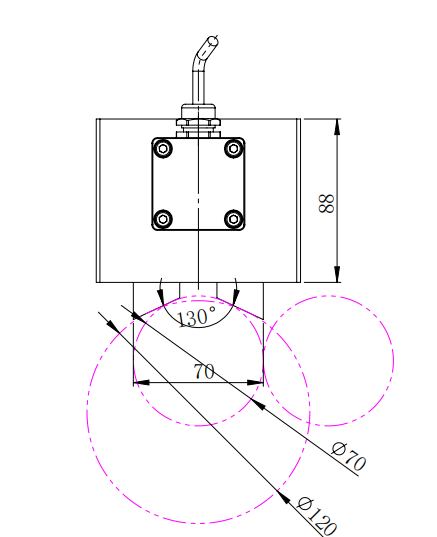
Заказчику требовалось обрабатывать заготовки круглых валов с широким диапазоном размеров. Диаметр деталей - от 70 до 120 мм, длина - от 100 до 1800 мм, максимальный вес - 40 кг. Процесс обработки требовал стабильного захвата, точного позиционирования и плавного перемещения во время автоматизированной работы.

Исходя из этих требований, мы разработали магнитный захват с использованием двух электропостоянных магнитов HEPMT-1611G, работающих вместе. Такая конфигурация обеспечивает достаточную силу удержания, позволяя роботу работать как с короткими, так и с длинными валами. Магнитный захват устанавливается непосредственно на фланец робота и подключается к системе управления для простого включения/выключения магнитного управления.
Во время испытаний на месте эксплуатации магнитный захват продемонстрировал надежную работу в сочетании с системой технического зрения. Робот смог определить, захватить, поднять и перенести валы разных размеров без механических регулировок. Бесконтактный метод захвата позволил защитить поверхность деталей и снизить потребность в сложных механических приспособлениях.
Испытания также показали, что магнитный захват хорошо адаптируется к изменениям длины и положения детали. Благодаря использованию системы технического зрения робот поддерживал неизменные точки захвата и стабильное движение на протяжении всего процесса манипулирования. Электропостоянная конструкция обеспечивает надежный захват во время работы, требуя питания только во время намагничивания и размагничивания.
Этот проект подтверждает, что правильно разработанный магнитный захват хорошо подходит для автоматизированной обработки цилиндрических стальных деталей. Это простое, стабильное и гибкое решение для применения роботов в современных системах автоматизации.

